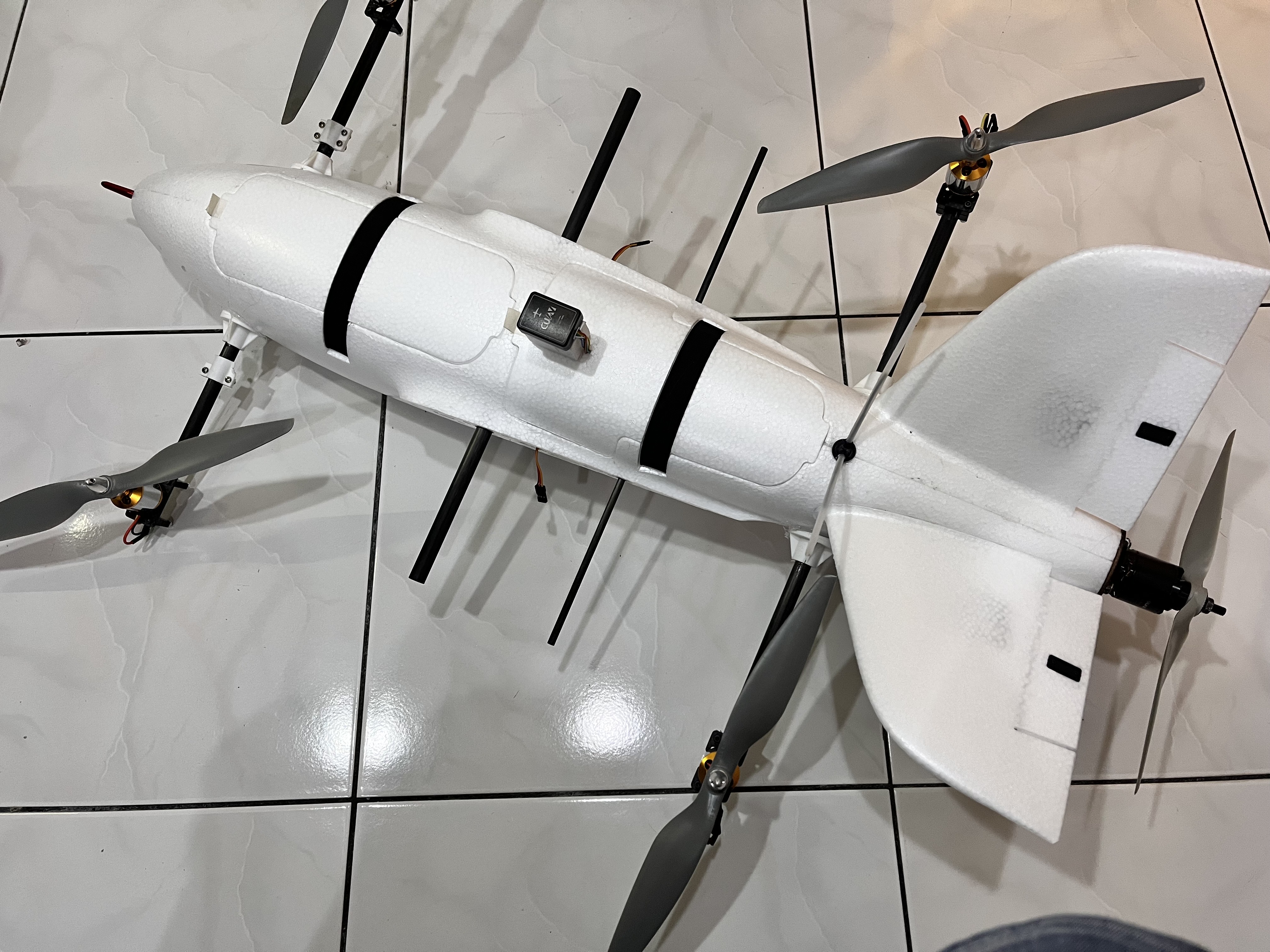
製作過程就不贅述了,跟2號機差不多。只不過這次選擇馬達座採用橫式,這樣可以維持機翼不用修改,也不需要另外走線,這樣就可以方便拆裝。
只是橫置的話,很難把兩根管子埋到剛好平行,結果是盡量保持平衡插進去之後再用補土作為細部角度調整。
當然,最後測試的時候發現僅用機體來支撐管子強度也不夠,所以3D列印了四個補強底座。
另外馬達的角度也傷腦筋,稍微有點差異就會造成扭矩不平均,使得其中一個對角的馬達為了要抵抗扭矩而不正常抬高轉速,導致過熱。
所以3D列印的馬達座就不適用了,後來改用淘寶的馬達座方便調整。
至於這次停懸PID有用心調整,滾轉跟俯仰因為質量分布不同要分開調整。
前腳架也在試飛的時候扯斷,因為很難確保下降的時候不往前進,所以我打算就完全不使用腳架。
3/17 第n次試飛。這次戶外測試一次解決馬達角度調整跟PID調整。基本上很順利完成。馬達角度最後是覺得只要調到不過熱即可,因為有時候因為側風緣故,也會導致其中兩顆馬達過熱。
這次發現從Quad過渡到FWA的速度是個大問題。如同一拿到飛機時就發現這台飛機主翼攻角非常大,猜想可能會有問題。結果真的是這樣

第一次從Q模式轉到FWA,一直抬頭到直接在天上翻了一圈,後來趕快切回Q模式才救回來,另外一次則是幾乎失速。
回來看了一下紀錄,基本上飛行速度最高超過50kph就很容易抬頭,大概40-45就很好飛。
所以關鍵是從Q過渡到A模式的速度要降低。
另外重心問題也要調整,目前前推動力太大,我打算把前推馬達換小一點,也順便降第尾巴重量。
過渡相關參數
https://ardupilot.org/plane/docs/quadplane-transitions.html#quadplane-transitions
如果您轉換到任何其他固定翼模式,則 VTOL 電機將繼續提供升力和穩定性,直到您達到 ARSPD_FBW_MIN 空速(如果沒有空速傳感器,則為空速估計值)。這個階段稱為“過渡空速等待”。
(目前ARSPD_FBW_MIN =9, ARSPD_FBW_MAX = 22) 前者約32kph 應該可以,我把後者改成15 (約50kph)
一旦達到ARSPD_FBW_MIN ,僅 VTOL 電機的貢獻將在Q_TRANSITION_MS毫秒(默認值為 5000,即 5 秒)內緩慢下降,然後將關閉。傾轉旋翼將緩慢旋轉至全前推力配置。一旦轉換完成,無論車輛現在處於何種固定翼模式,油門和姿態的正常控制都會恢復。
下面這段根T1-Ranger遇到問題有關
如果設置了Q_OPTIONS的第 19 位且Q_TRANS_FAIL不為零,並且空速大於ARSPD_FBW_MIN的 1/2 ,則將立即完成向固定翼的過渡。如果沒有使用空速傳感器,並且過渡到逆風,這可能會阻止在轉彎之前獲得準確的空速估計,這很有用。如果不使用Q_TRANS_FAIL超時和此 Q_OPTION,轉換可能會無限長,因為由於低地速,空速可能會報告為低於ARSPD_FBW_MIN 。
3/23
我在21號的時候更換了小一號的前推電機且稍微加了墊片把推力線朝下。加上飛行的時候把重心從主梁改到說明書的主梁前緣。起飛抬頭情況大受改善
測得的速度數據如下
失速點: 35kmh (9.7m/s)
最高速(不抬頭情況): 約25-28 m/s (90-100kmh)
最高約25-28 m/s28 (90-100kmh)
巡航速度(50%油門) 17m/s = 61kmh
飛行速度參數設置
ARSPD_FBW_MAX:(28) 這是載具的最快正常飛行速度。通常,2 倍標稱巡航速度是一個很好的目標。
ARSPD_FBW_MIN:(13) 這是載具的最低飛行速度。它應設置為至少比車輛失速速度高 25%。
一旦達到ARSPD_FBW_MIN ,僅 VTOL 電機的貢獻將在Q_TRANSITION_MS毫秒(默認值為 5000,即 5 秒)內緩慢下降,然後將關閉。傾轉旋翼將緩慢旋轉至全前推力配置。一旦轉換完成,無論車輛現在處於何種固定翼模式,油門和姿態的正常控制都會恢復。
校正空速傳感器 https://ardupilot.org/plane/docs/calibrating-an-airspeed-sensor.html
選擇自動校正比較快....
設定 Q_ASSIST_SPEED (10)
這是四電機將在固定翼模式下提供穩定性和升力輔助的速度。零意味著除了過渡期間沒有任何幫助。請注意,如果將其設置為零,則其他 Q_ASSIST 功能也將被禁用。較高的值會導致更多的誤報,從而浪費電池。較低的值會導致較少的誤報,但會導致需要更長的時間來觸發援助。如果不確定,則將其設置為比您飛行的最小空速低 3 m/s。如果您沒有空速傳感器,則使用比您飛行的最小空速低 5 m/s 的速度。如果你想禁用裝備檢查 Q_ASSIST_SPEED 然後設置為 -1。
諸元性能
- 空機: 1.75kg
- 電池: 0.85kg 4s 3000mAh/4p or 4200mAh/3p
- 60%油門有風約16m/s(57kmh) 15A
- 起飛約40A
沒有留言:
張貼留言