英文原版
建议参考官方文档或者雷迅中文版http://doc.cuav.net/tutorial/copter/
一起食用,风味更佳~~!
为治疗大佬的急躁症,开出一剂特效药方~~直接下载最下方的计算器,填入详细信息直接生成·保守·保守·保守·的参数,飞行不满意在来看详解慢慢调整

MOT_BAT_VOLT_MAX 电芯最高电圧,一般电芯设置4.2,高压电芯一般设置4.35(4.3-4.4根据实际设置)*电芯数量(3S*3;4S*4);
MOT_BAT_VOLT_MIN 电芯的最低电压,一般设置3.3,高压电芯设置3.5,也可以高一点;使用18650或者21700电芯的可以设置到3*电芯数量(3S*3;4S*4)
(本人小白,理解可能不够透彻,此二参数可能涉及到电压变化时的PID补偿,请指正)
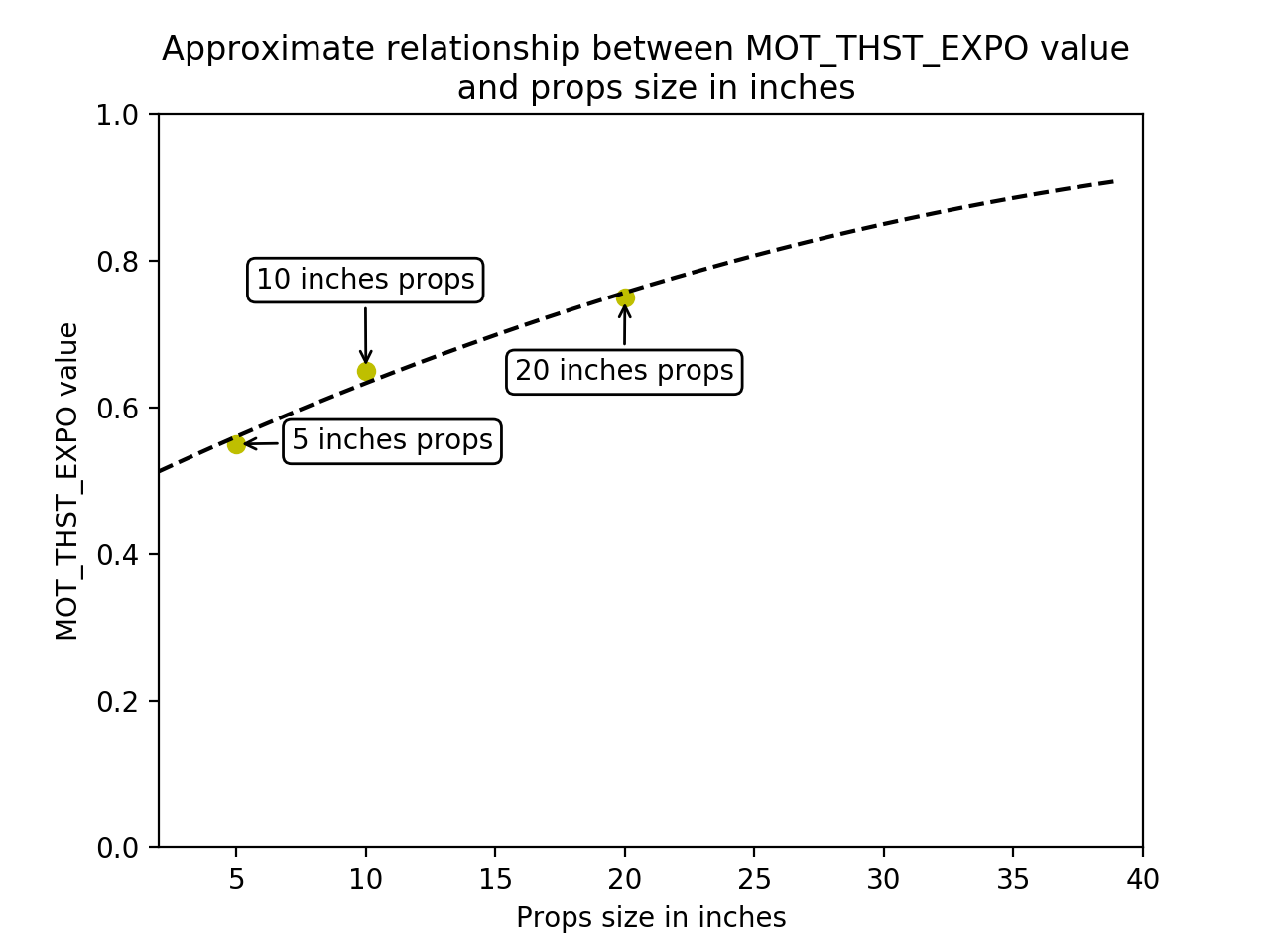
MOT_THST_EXPO 推力曲线
如下图,根据螺旋桨尺寸设置,穿越机5寸桨设置0.55;
常见的大疆2212/2312电机9045/1038桨设置0.65;
6系电机20寸桨如大疆E2000动力可以设置0.75
其他尺寸根据下图以此类推
电机部分
MOT_SPIN_ARM 电机解锁时的怠速转速,指的是解锁起飞前的转速,如果怠速太高降低该值,如果解锁后电机不转或由于转速太低卡顿的情况增大该值,小比例调节,一次不要加的太多以免发生危险
MOT_SPIN_MIN 可以理解为飞行时的最低转速,注意区分上一条参数,这里指的是飞机在飞行时的转速,建议比解锁时转速大三分之一以上;有的同学动力过剩,拉低油门还往上飞,应调小该值
INS_ACCEL_FILTER 加计滤波,10-20,大桨调小小桨调大,一般默认
INS_GYRO_FILTER 陀螺滤波, 5寸80Hz ,10寸 40Hz , 20寸20Hz
官方解释:https://ardupilot.org/copter/docs/parameters.html#ins-gyro-filter

ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX
10寸110000,20寸 50000 , 30寸20000
ATC_ACCEL_Y_MAX 10寸27000, 20寸18000 ,30寸 9000
必改,疗效显著,但我使用的是偏方,大家还是按官方的来·······
P/R/Y具体参数参考下图


本疗程结束,开始试飞,基本常识不在复述、、、比如飞控校准,电机顺序、转向,螺旋桨正反,遥控通道正反等...自查自纠
自稳模式解锁,慢慢给油,飞机线性拉起不要飞太高不要有大动作,观察飞机姿态是晃还是抖,是大动作还是小动作
如果离地前就感觉要翻,立即收油上锁,参照上一条检查,一般是电调插错了火者螺旋桨装错
http://47.110.9.138/zb_users/upload/2021/01/202101061609922091692054.xls
沒有留言:
張貼留言